
SlamPlusPro多源融合建图设备规格书

1. 产品名称及管理号
-中文名称:多源融合建图设备
-型号:RS-SlamPlusPro
2. 产品简介
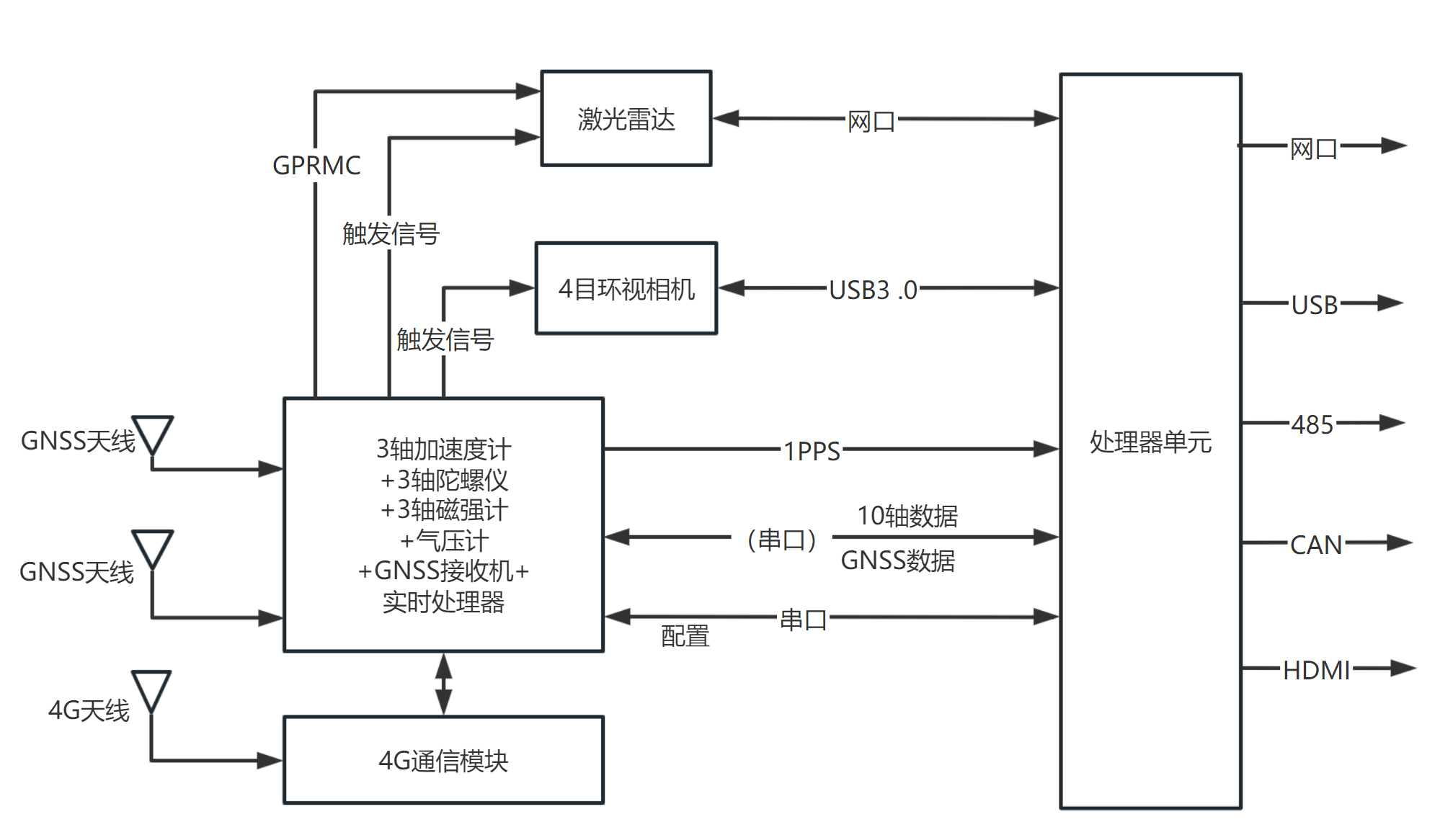
SLamPlusP ro是一款高度集成的高性能感知设备,融合了先进的传感器技术和时间同步机制。该设备内部集成四目环视相机、激光雷达、双天线差分GNSS模块、3轴陀螺、3轴MEMS加速度计、3轴磁强计以及气压计,内部传感器采样严格与1PPS(Pulse Per Second)同步,所有传感器数据采用ROS节点方式输出,所有数据接口均采用带锁扣连接器,更适合移动载体。SLamPlusPro 为多传感器融合、SLAM、测绘三维建模及全源融合导航研究者提供了一个强大且即插即用的解决方案,是当今领先的感知测量和全源融合导航开发平台。
2.1. 功能特点
-
基于ARM体系的Ubuntu20.04的64位操作系统,通过网口发布ROS2(galactic版本)传感器原始数据主题;
-
主题消息包括四目相机原始图像、激光雷达原始数据、IMU原始数据、磁强计数据、气压计数据、GNSS原始数据;
-
所有传感器数据通过1PPS信号进行硬同步。即使在没有GNSS信号下也能通过内置触发信号进行同步;
-
内部集成双天线差分GNSS模块,GNSS数据支持RTK基站差分数据输入,实现双天线RTK定位;
-
内部集成4G模块,无线传输GPS数据;
-
内部集成高性能MEMS-IMU;
-
内部集成3轴磁强计和气压计;
-
内部传感器数据采集完全与1PPS同步。
-
外部秒脉冲/内部秒脉冲模式。
2.2. 系统工作环境特性
参数值 |
描述 |
供电电压 |
DC12V±2% |
功耗 |
<50W |
工作温度范围 |
0℃~+50℃ |
存储温度范围 |
-40℃~+85℃ |
湿度范围 |
10~70%无冷凝 |
抗振动、抗冲击 |
IEC 60068-2-6:2007IEC 60068-2-27:2008 |
防水防尘 |
IP63 |
2.3 模块性能指标
•处理器
CPU |
处理器平台 |
OrinNX |
处理器核心 |
8核Cortex-A78AE v8.2 64 |
|
GPU |
芯片 |
32个Tensor Core的1024核NVIDIA Ampere 架构GPU |
NPU |
算力 |
100 Tops |
RAM+ROM |
大小 |
16GB+256GB |
接口 |
网络 |
1*10/100/1000Mbps以太网 |
扩展接口 |
1*RS485;1*CAN |
|
调试接口 |
1*HDMI;1*USB2.0 |
•四目相机
参数类型 |
参数值 |
像素 |
230万 |
传感器类型 |
CMOS |
黑白/彩色 |
彩色 |
快门类型 |
全局快门 |
分辨率 |
1920X200X4 |
最大帧率 |
30X4 |
靶面尺寸 |
1/2.6″ |
像元尺寸 |
3.0umX3.0um |
信噪比 |
38dB |
增益(倍数) |
4倍 |
动态范围 |
71.4dB |
•激光雷达
参数类型 |
参数值 |
型号 |
Helios-16P |
线数 |
16 |
水平视角 |
360° |
垂直视角 |
±15° |
转速 |
600/ 1200 rmp(10/20Hz) |
测距能力 |
150m(90m@10% NIST) |
近处盲区 |
≤0.2m |
测距精度(典型值) |
1cm |
FOV |
0.1°/1m 基线 |
水平角分辨率 |
0.2°/0.4° |
垂直角分辨率 |
2° |
帧率 |
10Hz/20Hz |
•GNSS
参数类型 |
参数值 |
信号支持 |
BD/GPS/GLONASS/GALILEO/QZSS |
单点定位(RMS) |
平面:1.5m,高程:2.5m |
DGPS(RMS) |
平面:0.4m,高程:0.8m |
RTK(RMS) |
平面:0.8cm+1ppm,高程:1.5cm+1ppm |
定向精度 (RMS) |
0.1°/1m 基线 |
时间精度 (RMS) |
20ns |
速度精度 (RMS) |
0.03m/s |
• 惯性测量单元
参数类型 |
参数值 |
陀螺量程 |
±300°/s |
陀螺噪声 |
0.007 °/s |
陀螺零偏不稳定性(Allan方差) |
1.64 °/h |
陀螺噪声密度(noist density) |
0.0015°/s/ |
陀螺角度游走误差(angle random walk) |
0.09°/ |
加速度计量程 |
±6g |
加速度计噪声 |
0.5mg |
加速度计零偏不稳定性(Allan方差) |
0.01 mg |
加速度计噪声密度(noist density) |
59.5ug/ |
加速度计速度随机游走误差(angle random walk) |
35.0mm/s/ |
输出数据频率 |
200hz |
• 气压计
参数类型 |
参数值 |
分辨率 |
0.012 mbar |
测量范围 |
10 到1200 mbar |
输出数据频率 |
50hz |
• 地磁传感器
参数类型 |
参数值 |
测量范围 |
-8.1gauss to 8.1gauss |
分辨率 |
4.35 milli-gauss |
灵敏度(增益) |
1370 LSb/gauss |
直线性 |
±2 %FS |
动态范围 |
±0.88-±8.1 gauss |
输出数据频率 |
50hz |
2.4. 接口描述
SlamPlusPro接口面一
-
GNSS1为GNSS的主天线,GNSS1接入后才能定位;同时接入GNSS2可以定向。
-
USB2.0用于用户接入键盘鼠标,HDMI用于用户接入显示器
SlamPlusPro接口面二
-
LED1:无线数据传输正常快闪;LED2为RTK状态灯,RTK定位后常亮;
2.5. 引脚定义
X1接口(以插头线上标号示意)
X1对应航插头定义 |
|||
X1-1 |
电源正(12VDC) |
X1-2 |
电源地 |
X2接口(以插头线上标号示意)
X2对应航插头定义 |
|||
X2-1 |
RSA85-A |
X2-2 |
RSA85-B |
X2-3 |
GND |
X2-4 |
CAN-L |
X2-5 |
CAN-H |
||
2.6. 电气参数
– 供电电压:DC12V±2%
– 整机功耗:<50W
2.7. 系统框图
3. 典型应用
-
建图定位
-
机器人
-
感知测量
-
低速自动驾驶
4. 机械尺寸(单位:毫米)
结构尺寸:140*140*188.5mm
5. 交付清单
-
SlamPlusPro多源融合建图设备*1
-
航插接口连接线*2
-
GPS棒状天线+馈线*2(型号BT-560)
-
4G天线*1